Genomen stappen bij de startup wizard van ESCON studio
Bij het opstarten van ESCON Studio krijg je eerst een startup wizard te zien. Bij deze wizard moet de servo controller met USB aan de computer aangesloten zijn. Als eerste moet je een veiligheidsinstructie lezen en accepteren: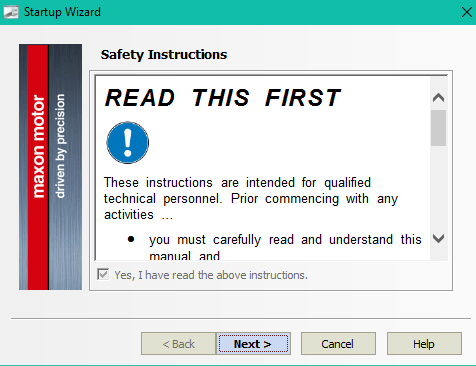
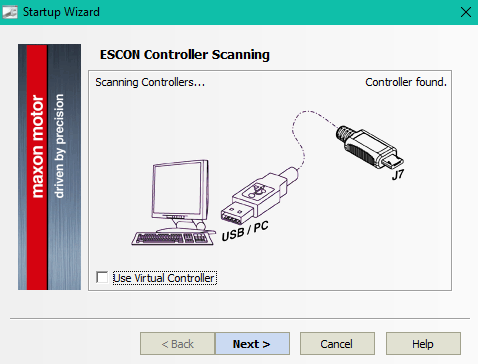
Als je dan op Yes, I have read the above instructions klikt en op next klikt, zal ESCON studio de aangesloten controller zoeken:
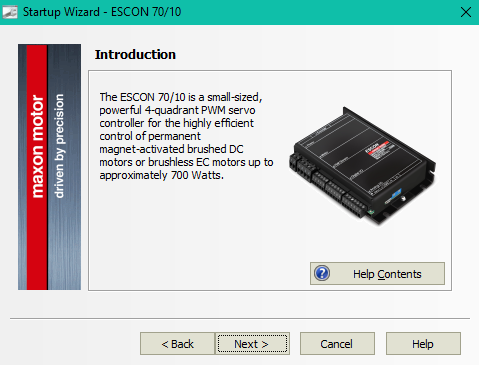
Als de controller gevonden is, en je op next drukt, zal je een overzicht krijgen van de gevonden controller (in dit geval een 70/10):
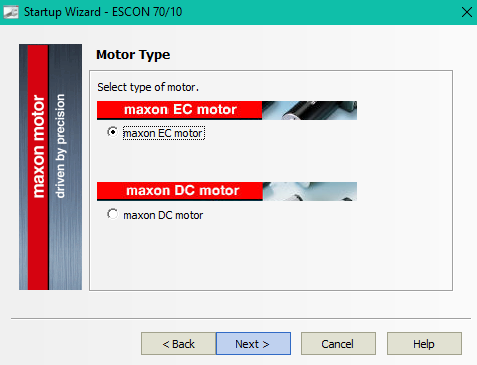
Hierna moet het soort motor gekozen worden, er is keuze uit een DC of EC motor:
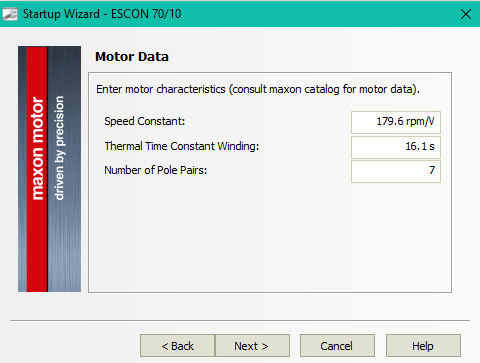
Hierna moet de Motor Data ingevoerd worden. Hier moet de Speed constant, Thermal Time Constant Winding en hoeveelheid polenparen ingevoerd worden. Deze zijn te vinden op de datasheet.



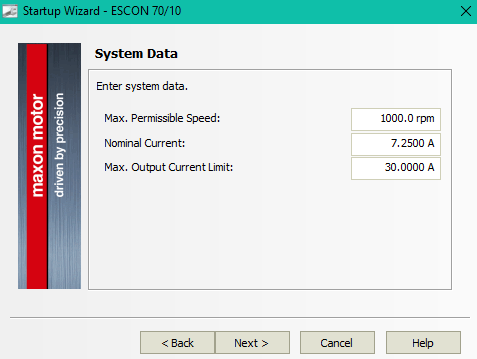
Hierna moet de System data ingevoerd worden. Hier moet je de maximaal toegestane snelheid ingeven, de nominal current en de maximale current:
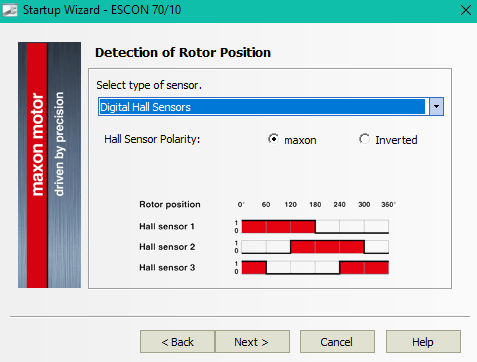
Hierna moet ingegeven worden hoe de positie van de motor wordt bepaald, voor de motoren die ik gebruikte waren dit de Digital Hall Sensors:
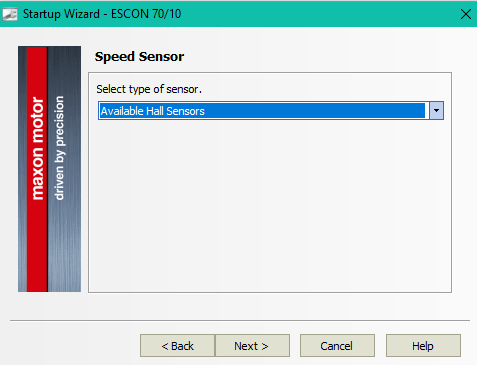
Hierna moet ingegeven worden hoe de snelheid van de motoren wordt bijgehouden. Ik heb dit gedaan aan de hand van de beschikbare hall sensoren.
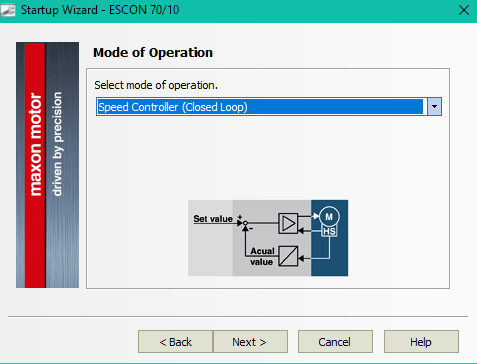
Hierna moet de Mode of operation ingegeven worden. Bij mij was dit een Speed controller met closed loop.
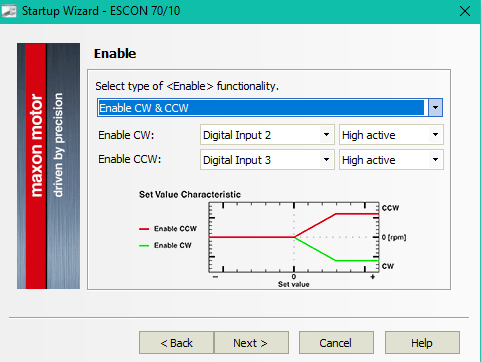
Hierna moeten de Enable pins ingesteld worden voor het aansturen van de motor voor het draaien met de klok mee of tegen de klok in. Ik heb allebei op Enable gezet zodat ze apart hoog gezet moeten worden. Hiermee kunnen ze ook allebei uitgezet worden. Ik heb pin 2 gekoppeld aan met de klok mee draaien en pin 3 heb ik gekoppeld aan tegen de klok in draaien:
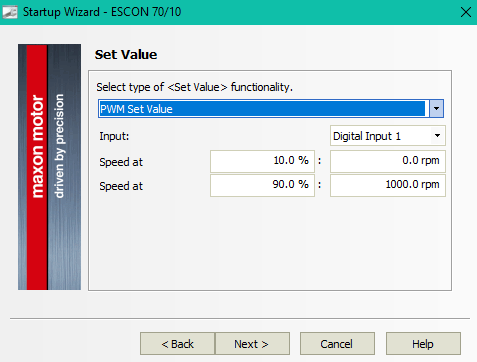
Daarna moet ingesteld worden welk PWM signaal overeen komt met welke snelheid. Hierbij kan de input geselecteerd worden en of het PWM signaal de RPM of het voltage regelt:
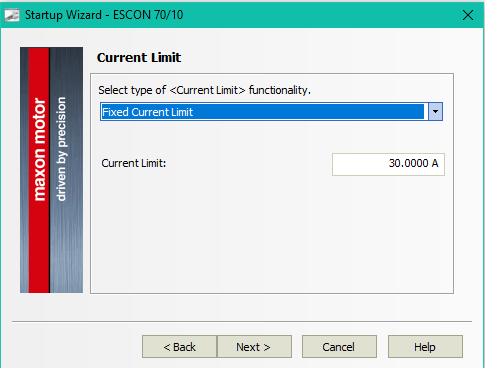
Hierna heb ik de maximaal toegestane stroomsterkte ingesteld. Aangezien de motoren die ik gebruik maximaal 80 A kunnen hebben, heb ik de maximale stroomsterke op de maximale stroomsterkte van de controller gezet: 30 A:
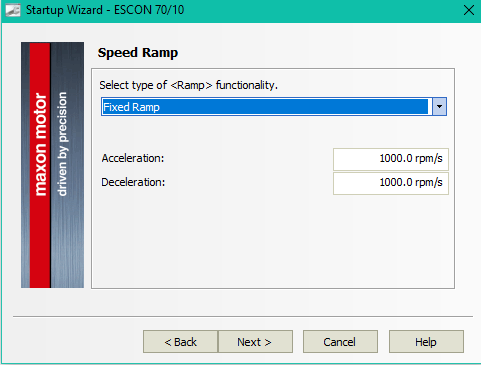
Hierna heb ik de speed ramp ingesteld. Dit geeft aan met welke snelheid de motor accellereert en decellereert. Ik heb dit op 1000 rpm/s gezet, en omdat de maximale snelheid van de motor ingesteld staat op 1000 rpm, zal de motor in 1 seconde naar deze snelheid bewegen.
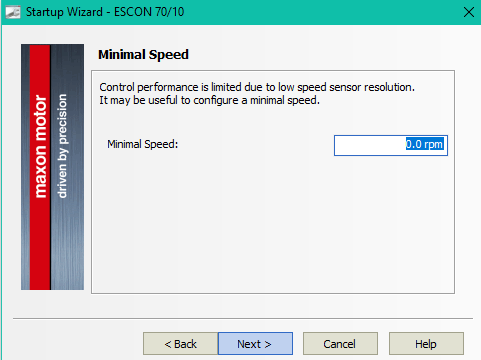
Hierna heb ik de minimale snelheid ingesteld. Deze heb ik gewoon op 0 rpm gelaten omdat ik wil dat de motor ook echt stil staat wanneer er een PWM signaal van 10% gestuurd wordt.
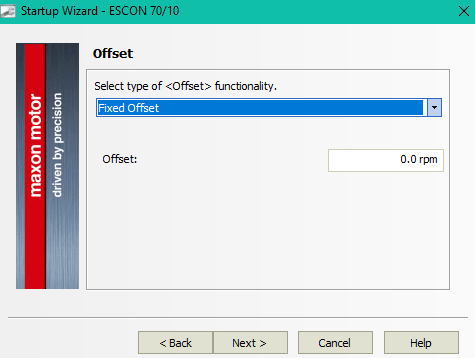
Hierna is het mogelijk om een offset in te stellen. Dit betekent dat de motoren altijd ten opzichte van deze offset zullen bewegen. Dit was voor mij niet nodig dus ik heb deze op 0 rpm gelaten.
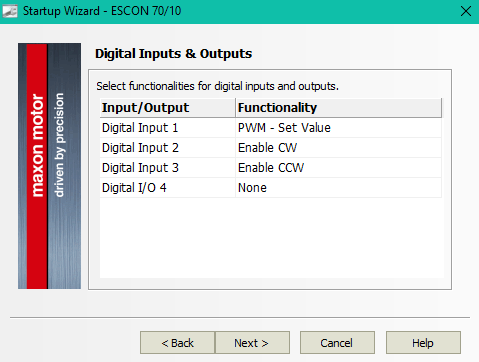
Hierna is een overzicht van de digitale IO te zien. Hier kunnen eventuele dingen aangepast worden als dat nodig is.
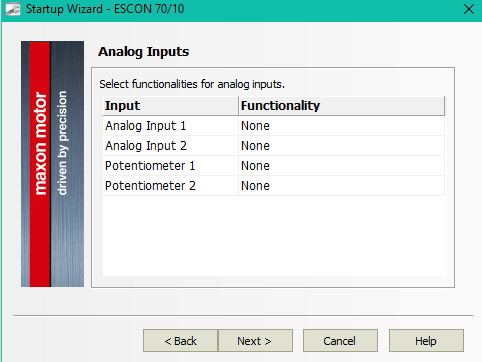
Hierna is een overzicht te zien van de analoge inputs. Deze kunnen ook nog veranderd worden.
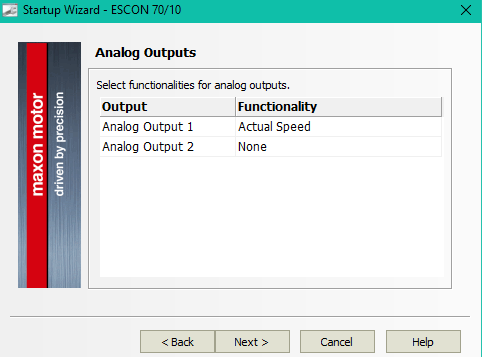
Hierna is een overzicht te zien van de analoge outputs. Deze kunnen ook nog veranderd worden. Ik heb hier de analoge output verbonden met de huidige snelheid, zodat ik deze uit kan lezen.
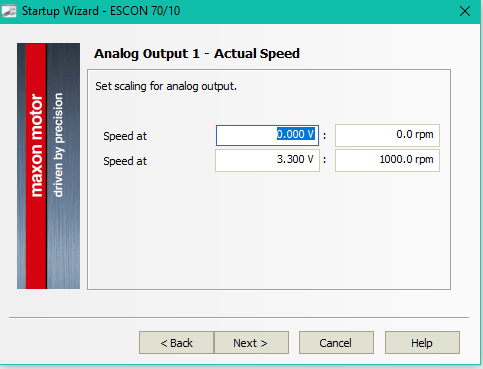
Hierna is een overzicht te zien van de geselecteerde analoge ouput. Hier kun je instellen welk voltage met welke waarde overeen komt.
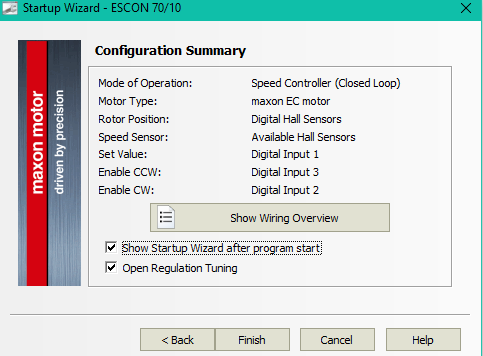
Als laatst is een overzicht te zien van de configuratie die met de startup wizard is gemaakt:
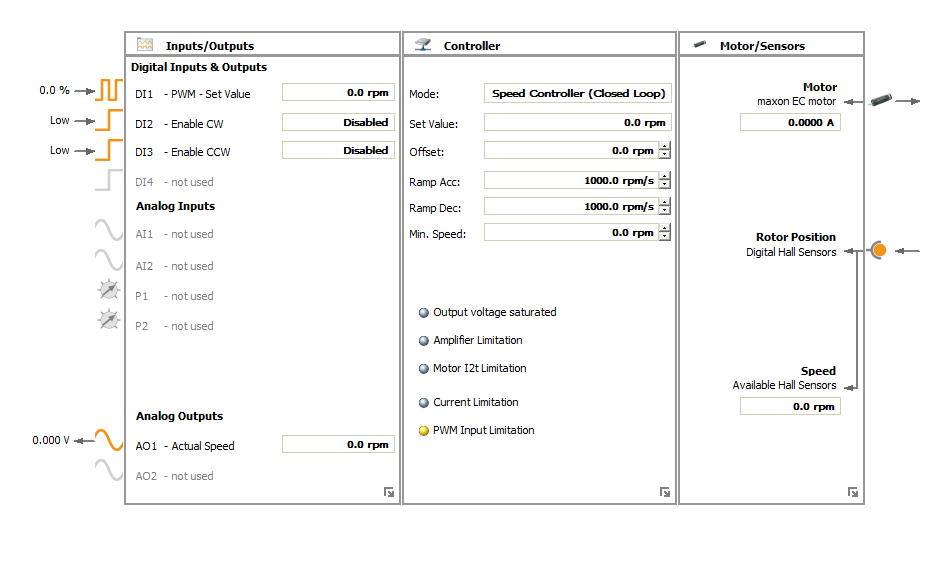
Als de startup wizard voltooid is, is het overzicht van de waarden van de controller te zien. Deze waarden worden live bijgewerkt als de controller aangestuurd wordt.