Fasen
Analysefase
- Lezen productomschrijving Jelle de Rooij
- Lezen ATEX certificering
- Lezen plan van aanpak Yannick van der Loop
- Lezen afstudeerverslag Yannick van der Loop
- STM Toolchain downloaden
- STM IDE downloaden en uitproberen
- STM bordje aan de praat krijgen
- Versnellingsmeter testen
- Ik heb de versnellingsmeter getest en ben erachter gekomen dat deze defect is. De documentatie hierover is hier te vinden.
- Magnetische Encoders testen (AMS AS5055A)
- Kijken welke motoren op de robotarm zitten
- Bellen met Jelle de Rooij over de motoren (13-09-2021 14:00)
- ESCON Studio
- ESCON studio - Startup wizard tutorial video De genomen stappen bij de startup wizard heb ik hier opgeschreven
- PWM aansturing via STM32 testen
- STM32 PWM Tutorial
- Voor het sturen van een PWM signaal via het STM32 bordje moet je een timer gebruiken. Deze moet je
instellen op PWM generation:
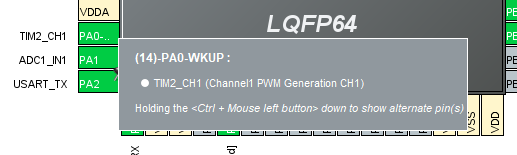
Hierna moet je weten wat de periode van het PWM signaal is. Dit kun je zien in destatic void MX_TIM2_Init(void)functie. Standaard staat deze op een waarde van 65535:htim2.Init.Period = 65535;. Je kunt deze ook uitlezen door de waarde van het Auto Reload Register (ARR) op te vragen:uint32_t period = TIM2->ARR;. Als je deze waarde weet, kan je een PWM signaal versturen door de waarde van het Capture / Compare Register aan te passen:TIM2->CCR1 = TIM2->ARR * ((float) speed_percentage) / 100.0;. - SPI via STM analyseren
- SPI tutorial from Eddie Amaya
- SPI tutorial from Digi-Key
-
Op het ontwikkelbord heb ik gekozen voor het gebruik van de SPI2 peripheral. Op de NUCLEO F446RE worden pins PC1 en PC2 voor MOSI en MISO respectievelijk gebruikt. Pin PB10 wordt voor SCK gebruikt.
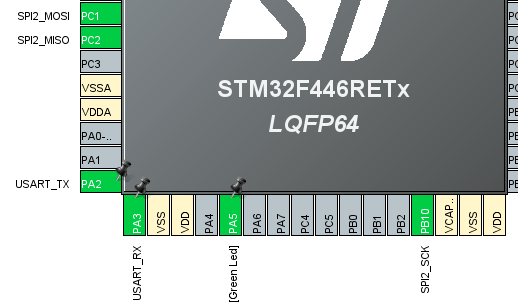
Volgens de HAL beschrijving kun je met
HAL_SPI_Transmit()data via SPI versturen en metHAL_SPI_Receivedata via SPI ontvangen. Als je eerst wil versturen en daarna gelijk wilt ontvangen kun je de functieHAL_SPI_TransmitReceivegebruiken. - I²C via STM analyseren
- I²C tutorial from Digi-Key
- Using I²C for any device on STM32 with HAL
- I²C on STM32 Series from Eddie Amaya
- Op het ontwikkelbord wat ik gebruik worden pins 8 en 9 voor I²C gebruikt. Deze heb ik ook ingesteld
om de I²C peripheral te gebruiken:
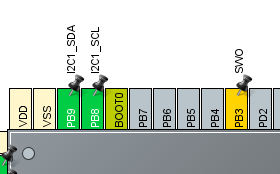
Met de HAL library kan er via I²C data uit een bepaald adres gelezen worden doorHAL_I2C_Mem_Readte gebruiken. Er kan data naar een bepaald geheugenadres op het I²C apparaat geschreven worden doorHAL_I²C_Mem_Writete gebruiken.
Onderzoeksfase / ontwerpfase
- Onderzoeken welke versnellingsmeter ik nodig heb
- Huidige versnellingsmeter:
- Analoog voor x, y en z as
- +/- 3g
- Self test
- ADXL345
- Datasheet
- Ultralow power
- 13 bit resolutie
- +/- 16g
- SPI of I²C
- Activity and inactivity sensing
- Single and double tap detection
- Free-fall detection
- 2 interrupt pins
- Integrated 32-level FIFO buffer
- Onderzoeken aansturing motoren
- Onderzoeken specs X-NUCLEO-IHM071
- Onderzoeken specs Maxon ESCON 70/10
- Hardware reference
- Maxon ESCON catalog page
- Kan aangestuurd worden met 3 GPIO pins
- CW (clockwise)
- CCW (counter clockwise)
- PWM voor hoeveelheid draaien
- Onderzoeken mogelijkheden STM32 NUCLEO-F446RE
- Datasheet
- X-NUCLEO-IHM07M1 kan max 2.8 A leveren, motoren hebben een nominal current van 7.25 A en een stall current van 81.9 A. De X-NUCLEO-IHM08M1 kan 3 - 30 A leveren. Dit is de beste optie als er een extension board gebruikt moet blijven worden.
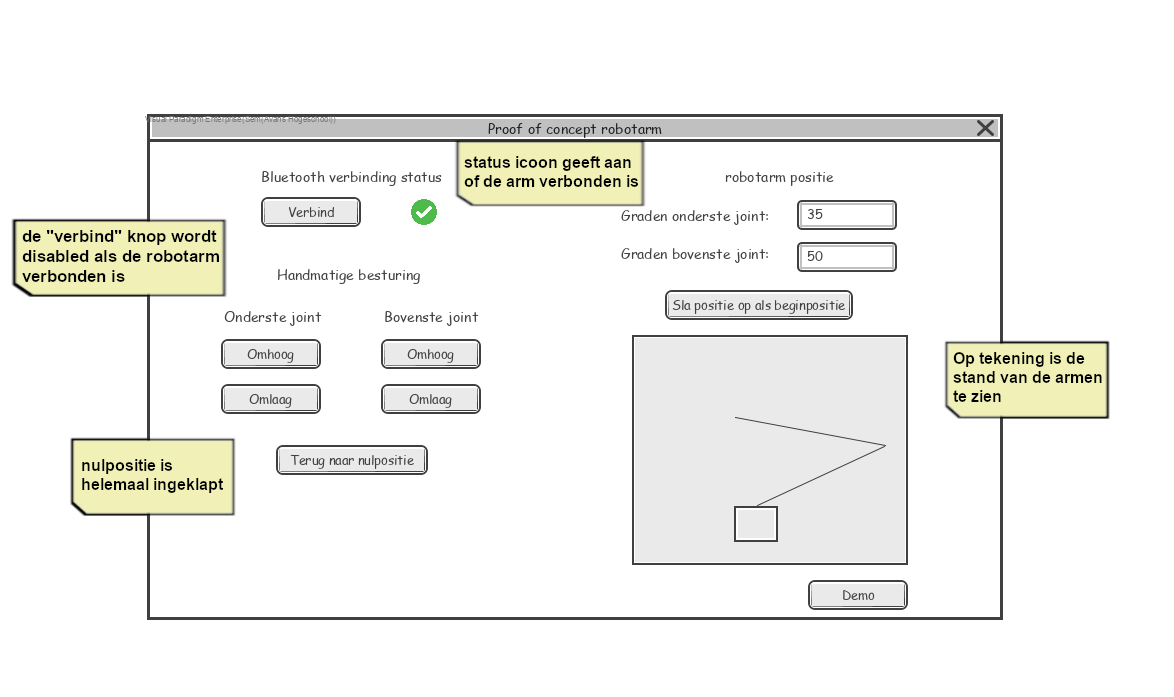
- Onderzoeken mogelijkheden user interface
Omdat het uit te voeren project om een proof of concept gaat, zal worden gekozen voor een Windows programma, omdat hiermee het testen en demonstreren van functies het makkelijkst gaat.
- Onderzoeken aansturing via user interface
- Bluetooth
- Serial (via USB, niet echt wenselijk aangezien je dan niet draadloos kan communiceren)
- IR met afstandsbediening
- Interrupts op STM microcontroller
- STM32 - Interrupt management
- External Interrupt Programming in STM32F4 | Nucleo-F446RE | STM32 CUBE MX | STM32F446RE | T - 8
- STM32F4 External interrupts tutorial
- Callbacks op STM microcontroller
Uitvoeringsfase
- Programmeren aansturing motoren
- Programmeren en uitlezen nieuwe versnellingsmeter
- Programmeren magnetische encoders
-
De magnetische encoders gebruiken een Clock polarity van 0 en een Clock phase op de tweede edge (CPOL = 0, CPHA = 1). Ook gebruiken ze MSB first. Er wordt nog geen CRC berekening bijgehouden voor de communicatie met de magnetische encoder. Om de peripheral aan te zetten moet nog
hspi2.Instance->CR1 |= (1 << 6);gebruikt worden nadat dehspi2.Initstruct is ingesteld in destatic void MX_SPI2_Init(void)functie. Hiermee wordt de SPE bit op 1 gezet. Het control register voor de SPI peripheral (CR1) kan dus als volgt ingesteld worden:BIDIMODE BIDIOE CRCEN CRCNEXT DFF RXONLY SSM SSI LSBFIRST SPE BR2 BR1 BR0 MSTR CPOL CPHA 0 0 0 0 1 0 1 1 0 1 0 0 0 1 0 1 In het control register 2 (CR2) van de SPI peripheral kunnen alle bits op 0 gelaten worden behalve de Slave Select Output Enable. Deze kan ook op 1 gezet worden als dat nodig is. (Dit hoeft niet als de slaves SS pins met GPIO pins aangestuurd worden). Dit wordt gedaan met
hspi2.Instance->CR2 |= SPI_CR2_SSOE;Om data te sturen via SPI heb ik een functie gemaakt die eerste de data in het data register van de peripheral zet, en waarna wordt gekeken of de transmit buffer wel leeg is of niet.
/** * @brief send something with SPI * @param data the data to send */ void SPI_send(uint8_t data) { // put the data in the data register SPI2->DR = data; // check if the transmit buffer is empty in the status register while ((SPI2->SR & SPI_SR_TXE) != SPI_SR_TXE); }Het versturen van de data met SPI kan ook gebeuren via de HAL library met
HAL_SPI_Transmit(&hspi2, &data, 8, HAL_MAX_DELAY);. - Samenvoegen code robotarm
- Programmeren user interface
- Programmeren communicatie tussen user interface en arm
- Programmeren beweging arm bij gebruik user interface
terminals van noodstop knop:
Werkende app 08-07-2022
Een video van de app die laat zien dat de motoren kunnen draaien met gebruik van de app